

Pocos dudan de que, en un futuro próximo, la robótica cambiará fundamentalmente los sistemas de producción e incrementará enormemente su nivel de automatización.
Para materializar esta transformación, debe reducirse mucho el esfuerzo humano necesario para configurar tareas automáticas. En otras palabras: los robots tendrán que aprender a resolver los problemas y adaptarse
a entornos dinámicos.
Este gran avance puede realizarse explotando el Internet de las cosas, los servicios y las personas (IoTSP, por sus siglas en inglés). El IoTSP facilita la creación de tecnologías y modelos de negocio novedosos que convierten en realidad la propagación de datos a gran escala, el análisis de corrientes y el aprendizaje automático.
Según las previsiones, el uso de la robótica en los ámbitos de fabricación y automatización aumentará sustancialmente en un futuro próximo y este crecimiento impulsará la expansión del mercado de los robots industriales. Estas expectativas indican que los robots industriales podrán utilizarse en muchos más escenarios de automatización.
En la actualidad, los robots industriales repiten incansablemente tareas complejas con una precisión elevada: soldadura, pintura, producción de automóviles y determinados tipos de montaje. Pero hay muchos otros escenarios de fabricación o montaje que podrían beneficiarse de la automatización robótica y que resultan difíciles de automatizar. Esto puede deberse, por ejemplo, a que las tiradas de producción son cortas o a que los entornos no están bien controlados. En muchos de estos casos, los humanos desempeñan ahora un papel importante. Para que el uso de robots se extienda a estos escenarios, los robots tienen que ser más flexibles, fáciles de programar y autónomos.
Además, los robots tienen que usar de un modo más inteligente la información facilitada por los humanos y por el entorno, y transmitir información a los humanos de una forma más inteligente. Pueden hacerlo analizando información conocida, extrayendo conocimientos de ella y poniendo esos conocimientos al alcance de no expertos.
Importancia del IoT y las tecnologías basadas en la nube
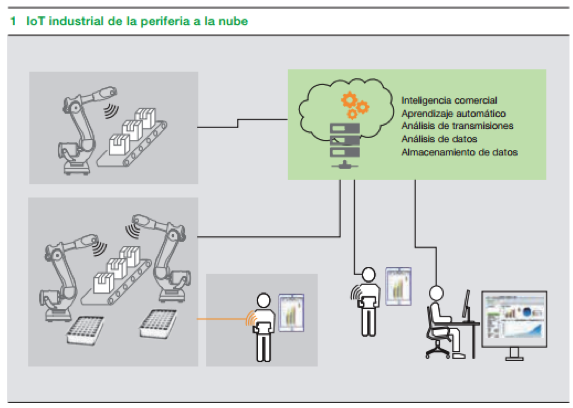
Con el Internet de las cosas (IoT) y las tecnologías basadas en la nube ya es posible trasladar grandes cantidades de datos de sensores y otra información de dispositivos a centros de datos. En el centro de datos se puede aplicar el análisis de corrientes para procesar la información del dispositivo en tiempo real con fines de filtrado, selección y agrupación.
La información procesada puede remitirse a distintos servicios basados en la nube, como herramientas de inteligencia comercial (BI), que convierten los datos brutos en tablas y gráficos y ofrecen información instantánea sobre situaciones de producción. La información también puede ser utilizada por paquetes de aprendizaje automático para realizar predicciones, para la optimización de procesos o el mantenimiento predictivo, por ejemplo. Muchos de estos servicios rentables y ampliables que pueden analizar grandes cantidades de datos en centros de datos ya están disponibles.
Por supuesto, es esencial que este análisis se realice de una forma segura y garantizando la integridad de los datos. Además, también deben mantenerse elevados niveles de fiabilidad y disponibilidad. Incrementando las capacidades del robot con tecnologías de nube y el IoT y la ubicación de la mayor parte del almacenamiento, el análisis y la computación a gran escala en centros de datos, es muy probable cumplir los requisitos futuros de inteligencia robótica sin incremento del coste ni del tamaño físico de los controladores.
Ejemplo de motivación
 Las formas en las que el IoTSP puede contribuir a la mejora del rendimiento operativo en escenarios de producción robótica pueden ilustrarse con el siguiente ejemplo: en una unidad de montaje de piezas pequeñas, dos robots trabajan en colaboración. Las piezas pequeñas se presentan en dos alimentadores distintos. Los robots toman piezas de sus respectivos alimentadores, las montan y colocan el conjunto en una cinta transportadora. Un operador o un jefe de producción pueden usar un dispositivo móvil para supervisar el estado de la producción y obtener información sobre los dispositivos de la unidad de producción en cualquier momento y desde cualquier lugar. Los KPI (indicadores clave del rendimiento) del dispositivo también se pueden consultar para tomar decisiones de mantenimiento.
Las formas en las que el IoTSP puede contribuir a la mejora del rendimiento operativo en escenarios de producción robótica pueden ilustrarse con el siguiente ejemplo: en una unidad de montaje de piezas pequeñas, dos robots trabajan en colaboración. Las piezas pequeñas se presentan en dos alimentadores distintos. Los robots toman piezas de sus respectivos alimentadores, las montan y colocan el conjunto en una cinta transportadora. Un operador o un jefe de producción pueden usar un dispositivo móvil para supervisar el estado de la producción y obtener información sobre los dispositivos de la unidad de producción en cualquier momento y desde cualquier lugar. Los KPI (indicadores clave del rendimiento) del dispositivo también se pueden consultar para tomar decisiones de mantenimiento.
En caso de cambio súbito, como la ralentización de un alimentador por un problema de suministro de las piezas de montaje, los robots, los alimentadores y la cinta transportadora intercambian la información para adaptar el ritmo de trabajo y acomodarse a las nuevas circunstancias. Se informa al operador de la situación a través de su dispositivo móvil. Si el rendimiento operativo se encuentra dentro de determinados límites de tolerancia, puede decidir no interrumpir los procesos de producción. O, si hay un alimentador defectuoso, puede comprobar los KPI de los dispositivos y descubrir que un técnico de mantenimiento está a punto de sustituir varias piezas de ese alimentador. Esto significa que el sistema puede funcionar así hasta que se realice el mantenimiento y evitar una interrupción de la producción que resultaría muy costosa.
Estrategias para la solución
El escenario que acabamos de describir implica control robótico industrial, redes de sensores y actuadores que demandan una conducta temporal predecible y en tiempo real del sistema de control del robot. Otro requisito es un conjunto de características de servicio inteligentes que puedan implantarse con tecnologías IoT para mejorar el rendimiento operativo en la fábrica.
Una forma de materializar todos estos requisitos es:
- Propiciar el intercambio de datos entre robots conectados y otros dispositivos de una unidad de producción.
- Utilizar aplicaciones robóticas en tiempo real con latencia baja y predecible en la periferia de la red o en los controladores del robot.
- Conectarse a un centro de datos remoto para obtener capacidades de análisis de datos y BI a gran escala.
Así pueden ofrecerse a los clientes soluciones de servicio añadidas basadas en la nube, como acceso sencillo y visualización de datos de producción en la nube. Además, con infraestructuras basadas en la nube capaces de proporcionar recursos de computación y almacenamiento elásticos, se pueden desarrollar nuevos servicios centralizados de robótica inteligente sobre BI y análisis de datos ➔ 1. Ejemplos de estos son el aprendizaje automático y el análisis avanzado de grandes conjuntos de datos de robots recopilados durante los ciclos de funcionamiento.
Concepto de punto a punto y solución técnica
Para hacer realidad la estrategia descrita, ABB ha diseñado una plataforma de colaboración ampliable que permite compartir información entre robots industriales conectados, otros dispositivos industriales de una unidad de producción y personas ➔ 2. La plataforma, una vez convertida en un producto final, ofrecerá facilidad de uso para la configuración, p. ej., del descubrimiento, la conexión para la colaboración y la prestación de servicios con robots ➔ 3.
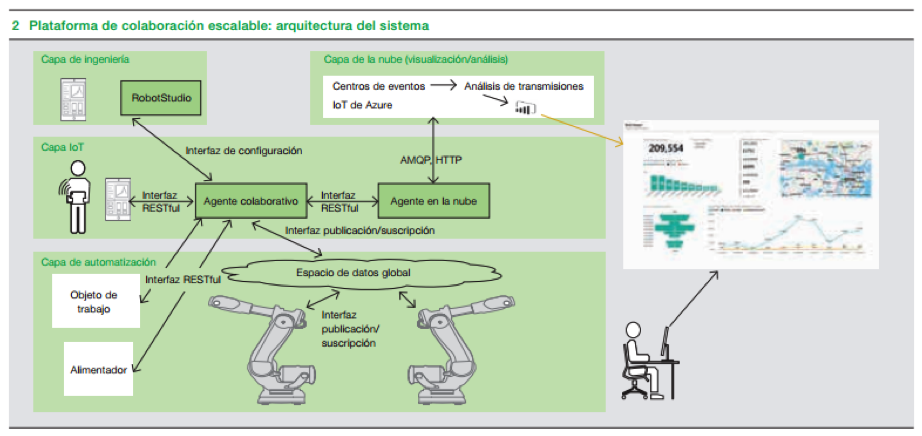 En la capa de automatización de la plataforma, el intercambio de datos entre robots en tiempo real es posible gracias a la tecnología de middleware de tipo publicar-suscribir, como el marco DDS (servicio de distribución de datos). Un dispositivo publica información sobre un tema y otros dispositivos interesados se pueden suscribir para recibirla. No es necesario que los dispositivos suscriptores sepan de dónde procede la información, porque también se proporcionan datos contextuales que indican a estos dispositivos qué hacer con ella. Los dispositivos intercambian información en un espacio de datos global virtual. Los robots y el alimentador citados en el ejemplo anterior podrían, por ejemplo, intercambiar información (posición actual, velocidad, etc.) a través de este espacio de datos global. No todos los dispositivos de una unidad de producción son aptos para participar en un marco de tipo publicar/suscribir.
En la capa de automatización de la plataforma, el intercambio de datos entre robots en tiempo real es posible gracias a la tecnología de middleware de tipo publicar-suscribir, como el marco DDS (servicio de distribución de datos). Un dispositivo publica información sobre un tema y otros dispositivos interesados se pueden suscribir para recibirla. No es necesario que los dispositivos suscriptores sepan de dónde procede la información, porque también se proporcionan datos contextuales que indican a estos dispositivos qué hacer con ella. Los dispositivos intercambian información en un espacio de datos global virtual. Los robots y el alimentador citados en el ejemplo anterior podrían, por ejemplo, intercambiar información (posición actual, velocidad, etc.) a través de este espacio de datos global. No todos los dispositivos de una unidad de producción son aptos para participar en un marco de tipo publicar/suscribir.
Esto puede deberse, por ejemplo, a limitaciones de accesibilidad de dispositivos de terceros o potencia de computación finita. Pero estos dispositivos pueden interactuar con robots y con otros dispositivos a través de una interfaz RESTful ligera, proporcionada por un agente colaborativo en la capa del IoT. Las interfaces RESTful se basan en REST (transferencia de estado representacional), una arquitectura web que requiere menos ancho de banda que otras arquitecturas equivalentes y que simplifica la conexión de diversos clientes. El agente colaborativo se puede instalar en cualquier dispositivo (incluido el controlador del robot) en el que se pueda instalar el marco de tipo publicar/suscribir.
La interfaz RESTful también se emplea en los dispositivos móviles utilizados para supervisar unidades de producción y en agentes en la nube. El agente en la nube, instalado en un controlador de robot o en cualquier otro dispositivo de la unidad de producción, emplea AMPQ (protocolo avanzado de cola de mensajes) y HTTP como interfaz para enviar datos a la capa de la nube o interactuar con ella.
La capa de la nube propuesta en la arquitectura permite ampliar las oportunidades de servicio mediante la conexión de dispositivos de la unidad de producción, o la propia unidad de producción, a la nube. Para esta plataforma de colaboración de robots concreta se utiliza Microsoft Azure IoT Suite, que ofrece una amplia gama de capacidades, como recopilación de datos de dispositivos, análisis de transmisiones, aprendizaje automático, almacenamiento y presentación de datos.
En concreto, ABB ha utilizado Azure IoT Suite para prestar un servicio de visualización y supervisión de datos de producción. La solución consiste en un cliente IoT, un centro de eventos, análisis de transmisiones y Power BI (una solución de BI de autoservicio). El agente en la nube envía datos del robot al centro de eventos. El servicio de análisis de transmisiones consume esos datos y permite ejecutar la lógica de procesamiento de corrientes (en una sencillo lenguaje similar a SQL). Los resultados de este procesamiento se envían a Power BI, que lleva a cabo la supervisión y la visualización de los datos de producción.
En la capa de ingeniería, se distinguen dos tipos de aplicaciones: Aplicaciones de configuración simplificadas basadas en la web y aplicaciones basadas en RobotStudio para la configuración avanzada de los robots y el resto de la producción.
Visión de futuro
El uso de tecnología IoT para conectar cosas, servicios y personas cambiará la vida cotidiana de los usuarios y propiciará operaciones industriales inteligentes. Imagine que las piezas pequeñas del escenario de ejemplo descrito anteriormente llevan etiquetas inteligentes que permiten la transmisión de determinada información, como dibujos CAD, descripciones e instrucciones de manipulación, a los robots y los operadores mediante comunicación inalámbrica. La difusión de esta información podría, por ejemplo, permitir el ajuste de las pinzas del robot en caso de que haya cambios en los tipos de piezas pequeñas. Actualmente, esta tarea es manual y se realiza fuera de la línea.
La idea central del IoTSP es obtener información sobre dispositivos y el entorno, analizar los datos del mundo físico y virtual para optimizar las operaciones y prestar servicios mejores a los usuarios.
Gracias a la prestación de nuevos servicios y experiencias de software para el cliente final basados en información extraída de varios dispositivos conectados, el IoTPS está creando una forma nueva de agilizar los negocios y el ritmo de la innovación.
Por Hongyu Pei-Breivold, Kristian Sandström, Larisa Rizvanovic, Marko Lehtola y Saad Azhar, de ABB Corporate Research, Suecia
















